PRECISION
SURGICAL SYSTEMS.
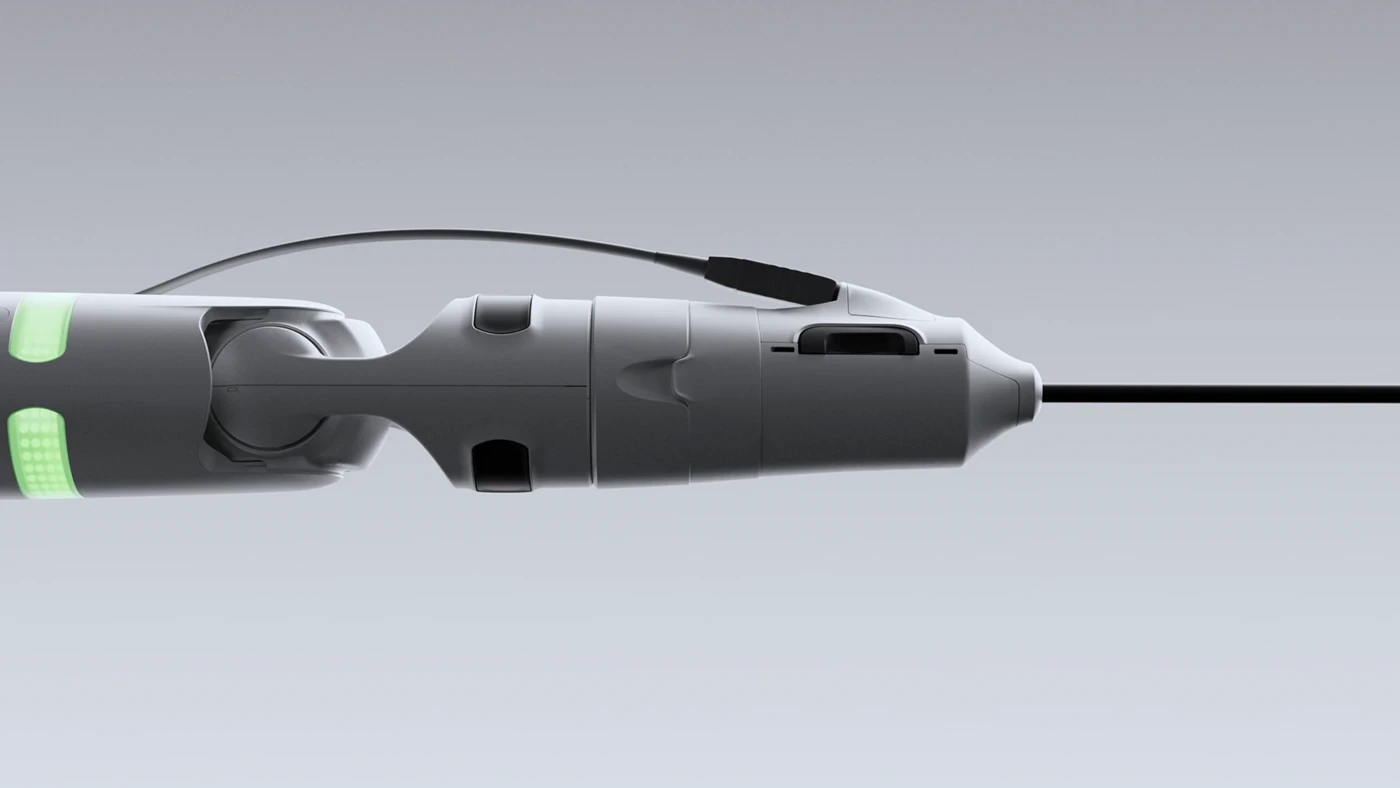
A robotic-assisted surgical system designed to replicate natural hand movements with strict mechanical accuracy. Built for modularity and high-fidelity control in crowded surgical theatres.
The Modeling Logic
The architecture of the robot was built using a Modular Sub-D workflow. Every component, from the carbon-fiber casing to the internal hydraulic lines, was designed to fit within a crowded surgical theatre. I focused on "human-sized" proportions to ensure the modularity felt grounded in real-world operating room constraints.
Kinematic Rigging
The challenge was replicating natural hand movements. I engineered a custom 7-DOF (Degrees of Freedom) IK-system that mirrors the surgeon's console inputs with zero latency in the animation.

Substance Surface Treatment
Texturing was performed in Substance Painter, utilizing a PBR workflow to differentiate between the sterile medical plastics and the high-performance alloy of the mechanical joints. I added subtle micro-scratches and surface imperfections to avoid the "perfect CG" look, grounding the robot in a used, professional environment.

Cycles Engine Pipeline
The final sequences were rendered using Blender Cycles. I opted for a high-sample path-tracing approach to accurately capture the bounce light within the sterile white environment. The lighting was designed to mimic a high-end surgical suite—bright, diffused, and revealing of every mechanical detail.
